Die PID-Regelung wird dazu verwendet, um eine Regelgröße (z. B. Druck, Temperatur, Frequenz, etc.) an den Sollwert anzugleichen. Für die Pumpensteuerung sind diese PID-Regler von großer Bedeutung, da sie als integriertes Bauteil die Drehzahl der Pumpe steuern und so den Automatikbetrieb mit allen daraus resultierenden Vorteilen ermöglichen.
Funktionsweise PID
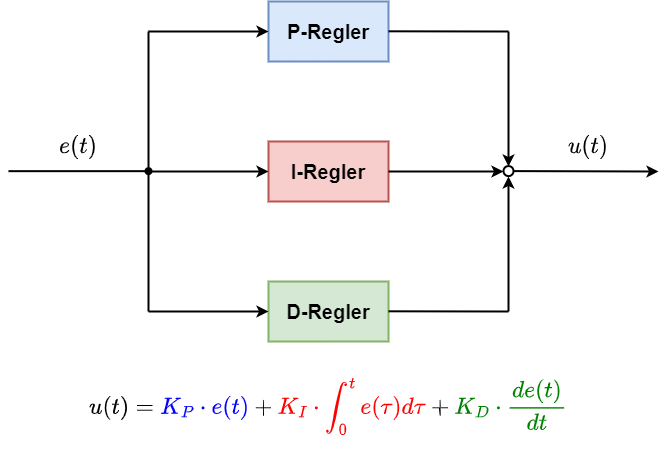
Der PID-Regler verwendet drei Glieder, das P-Glied (Proportionalanteil), das I-Glied (Integralanteil) und D-Glied (Differenzialanteil). Der Proportionalanteil regelt aufgrund der Differenz zwischen Soll- und Istwert.
Je näher sich der Istwert dem Sollwert annähert, desto geringer wird die Frequenz der Pumpe geregelt. Theoretisch wird der Sollwert nie erreicht. Der Integralanteil löst das Problem, dass der Istwert sich dem Sollwert annähert, jedoch nicht erreicht, da das Korrektursignal auch bei kleinen Differenzen des Soll- und Istwertes groß genug ist. Der Integralteil integriert also die Differenz.
Der Differenzialanteil verstärkt kurzzeitig das Signal der Differenz zwischen Ist- und Sollwert, sodass die Reaktion des Reglers kurzzeitig beschleunigt wird. Empfehlenswert ist der D-Anteil nur, wenn mit der PI-Regelung nicht das erwünschte Ergebnis erzielt wird.
Universalregler
Der PID-Regler wird wegen seiner vielfältigen Einsatzgebiete und der differenzierten Arbeitsweise auch als Universalregler bezeichnet. Er lässt sich sehr gut an verschiedene Regelstrecken anpassen und ist damit eine Lösung für diverse Herausforderungen.
Werden alle Glieder verwendet, zeichnet sich der PID-Regel durch eine schnelle Reaktion auf Differenzen (bedingt durch den D-Anteil), ein gezieltes Anfahren (durch den P-Anteil) sowie eine präzise Regelung nahe des Sollwertes (durch den I-Anteil) aus. Das Führungsverhalten wird entsprechend in drei Bereiche unterteilt.